]]>BeagleBoneMBD Shop68002024-12-06T09:14:04+09:00shopExtended Shaft付マイクロメタルギアモーター(75:1)
https://www.mbd-shop.jp/product/214
75:1 Micro Metal Gearmotor HP with Extended Motor Shaft
このギアモーターは、コンパクト (0.94インチ×0.39インチ×0.47イン…75:1 Micro Metal Gearmotor HP with Extended Motor Shaft
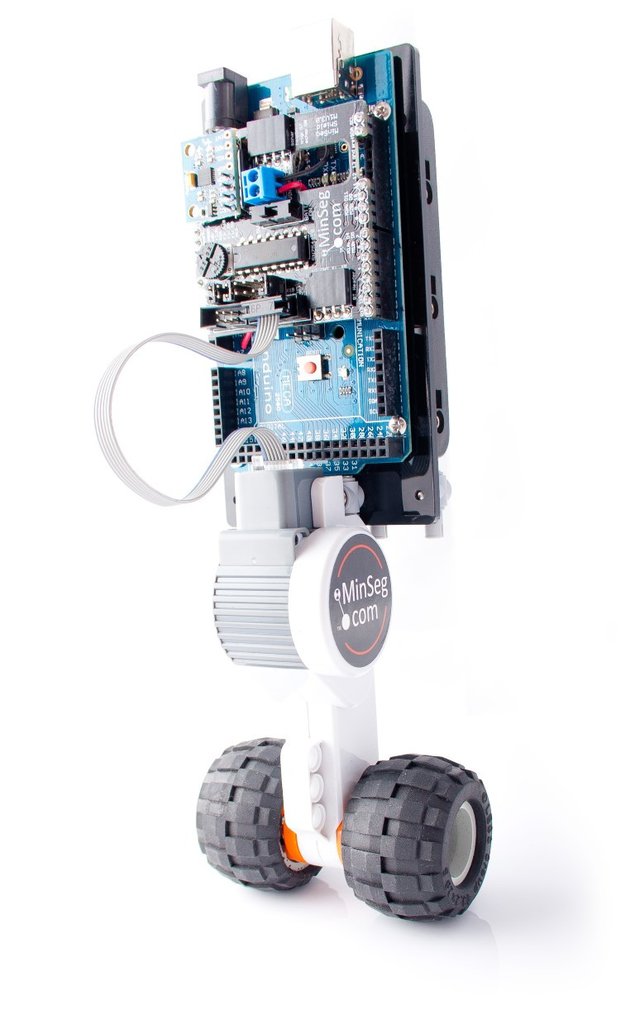
]]>制御系設計MBD Shop25002018-07-17T10:16:00+09:00shopControl System Design:Getting Started With Arduino and MATLAB
https://www.mbd-shop.jp/product/143
Auther:Mitsuo Hirata
Translator:Ivan Godler
Number of pages:247
This is a primer for those star…
Auther:Mitsuo Hirata
Translator:Ivan Godler
Number of pages:247
This is a primer for those starting to learn control system design.
The content of the book is unique in the sense that control system design
can be studied through practical experience by using an inexpensive control
experimental kit based on recently popular open source Arduino hardware.
By purchasing a low cost experimental kit and using the contents of this book,
it is possible for the reader to actually create their own controlled object
with electrical circuits and mechanical structure, and experience controlling
it by using their own controllers.
As opposed to most conventional theory books, which only explain theory
and describe the process of implementing it on an embedded system,
the basics of control theory and model-based development can be learned
through real experiment from this unique book.
<Contents>
Chapter 1 Introduction
Chapter 2 Getting Ready
Chapter 3 Using ArduinoIO
Chapter 4 Motor Speed Control
Chapter 5 Motor Position Control
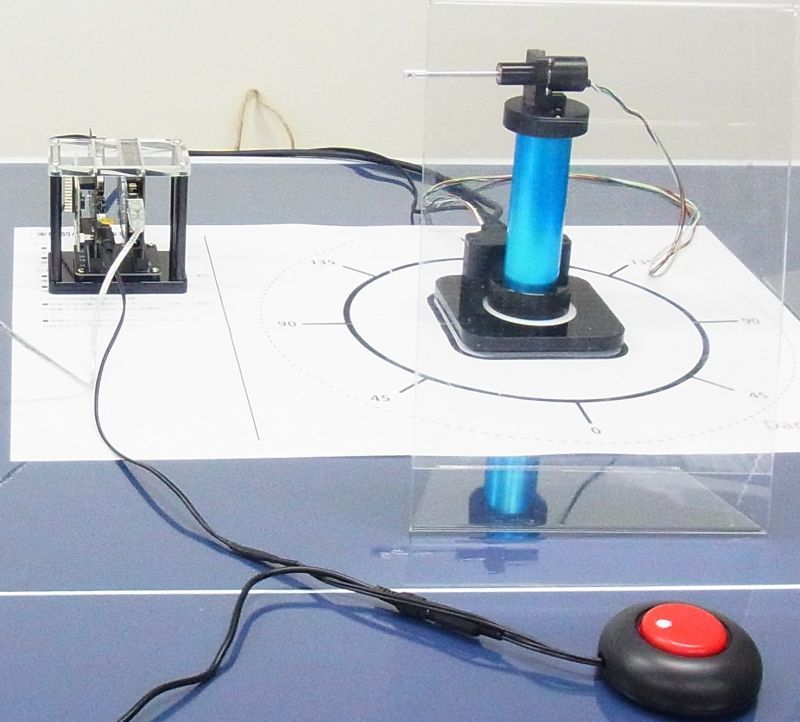
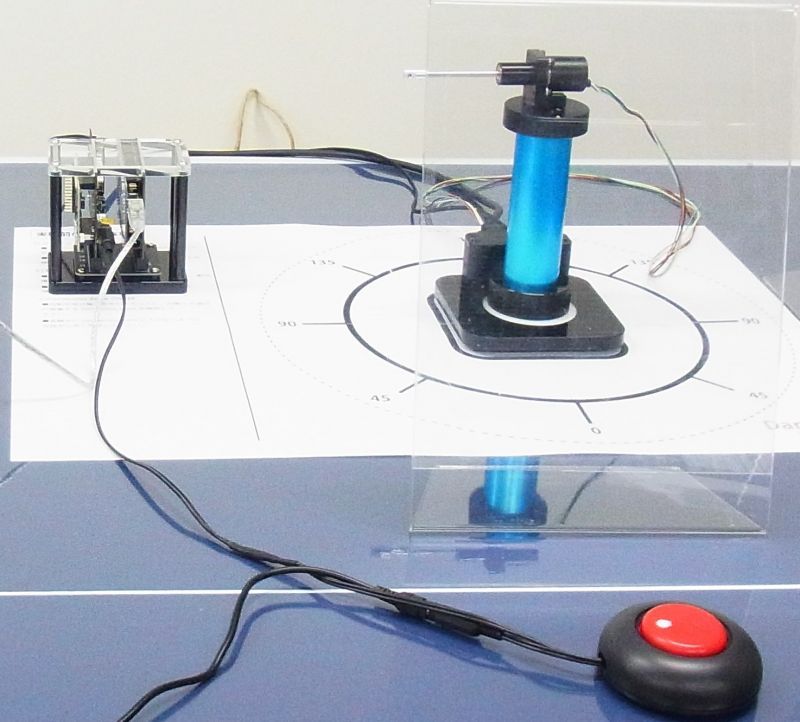
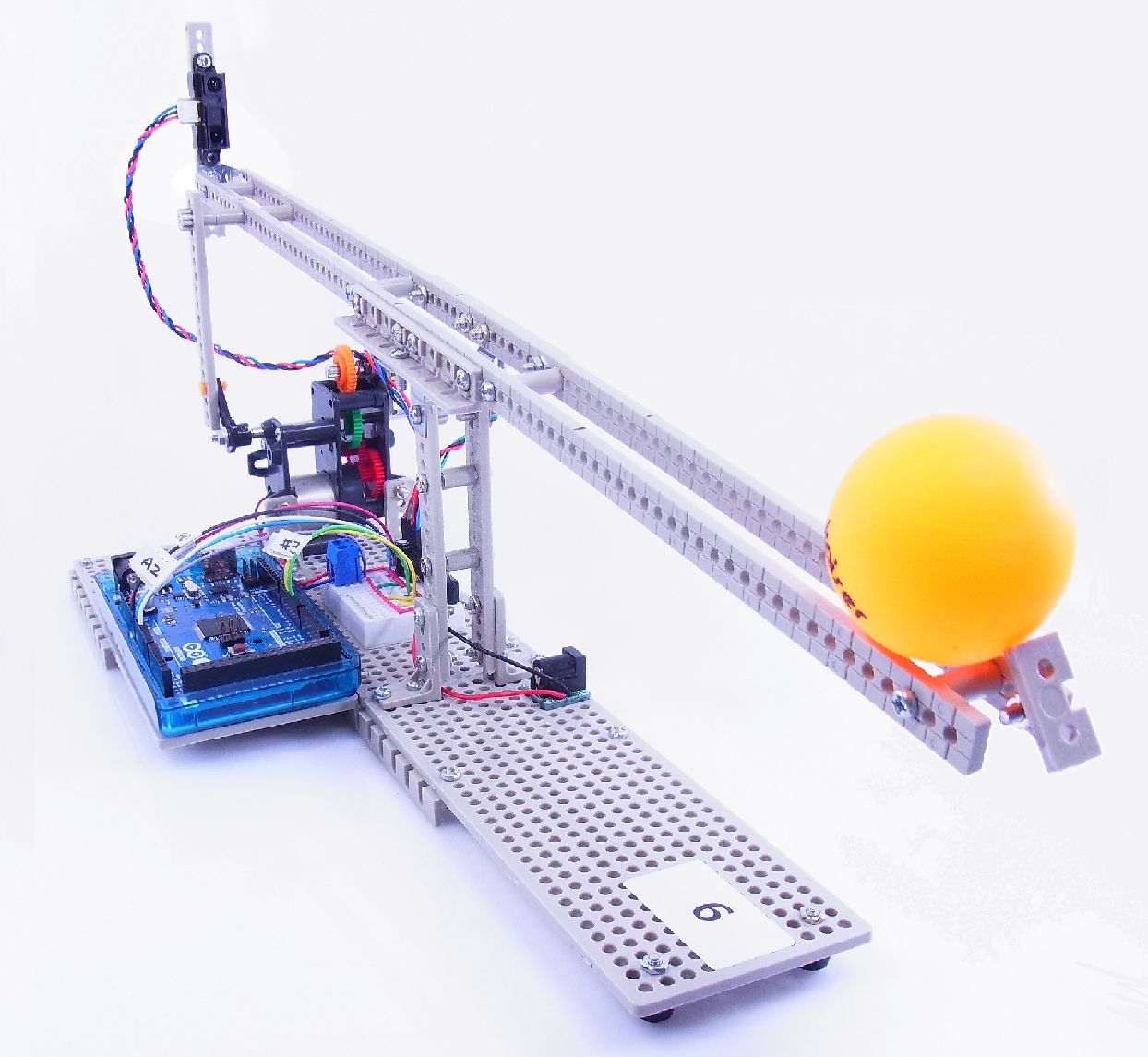
Chapter 6 Ball&Beam Experiments
Chapter 7 Using Modern Control Theory
Chapter 8 Run on Target Hardware
A Asembly Ball & Beam Kit
本書は、Modelica Associationでボードメンバーを務めるPeter Fritzson教授が執筆した「Introduction to Modeling and Simulation of Technical and Physical Modeling with Modelica」の翻訳書です。 本書では、Modelicaの基本概念や活用方法などを基礎から解説しています。
詳しくは、弊社までお問い合わせください。]]>受託開発・コンサルティングサービスMBD Shop2016-07-02T10:39:24+09:00shopControl System Design:Getting Started With Arduino and MATLAB
https://www.mbd-shop.jp/product/194
Auther:Mitsuo Hirata
Translator:Ivan Godler
Number of pages:247
This is a primer for those starting…
Auther:Mitsuo Hirata
Translator:Ivan Godler
Number of pages:247
This is a primer for those starting to learn control system design.
The content of the book is unique in the sense that control system design
can be studied through practical experience by using an inexpensive control
experimental kit based on recently popular open source Arduino hardware.
By purchasing a low cost experimental kit and using the contents of this book,
it is possible for the reader to actually create their own controlled object
with electrical circuits and mechanical structure, and experience controlling
it by using their own controllers.
As opposed to most conventional theory books, which only explain theory
and describe the process of implementing it on an embedded system,
the basics of control theory and model-based development can be learned
through real experiment from this unique book.
<Contents>
Chapter 1 Introduction
Chapter 2 Getting Ready
Chapter 3 Using ArduinoIO
Chapter 4 Motor Speed Control
Chapter 5 Motor Position Control
Chapter 6 Ball&Beam Experiments
Chapter 7 Using Modern Control Theory
Chapter 8 Run on Target Hardware
A Asembly Ball & Beam Kit
米で好評の学生向け MATLAB 入門の決定版を邦訳したもので、"Intorodution to MATLAB for Science and Engineering"(理工系のための MATLAB 入門)の第2版にあたります。これから MATLAB あるいは工学系ソフトウェアを学ぼうという学生に最適な"わかる"入門書です。各章の最後に扱った内容を復習するための「まとめ」及び定義が出てきた特別な記号、コマンド、関数を列挙した「MATLABのまとめ」が付けられています。
![自動車業界MBDエンジニアのためのSimulink入門[第2版]-4週間で学ぶSimulink実践トレーニング-](https://www.mbd-shop.jp/data/mbd-shop/product/20190619_2a5520.jpg)